
To Leap, or Not to Leap: How Animals Are Revolutionizing the Design of Robots
By Riya Bhatia
Balancing on the edge of a tree branch, a squirrel is presented with two options: to leap or to not leap. Although small and nimble, these animals are faced with the challenges of navigating complex environments and avoiding voracious predators. In fact, studying how these squirrels scamper through these terrains may provide scientists greater insight on a seemingly unrelated endeavor: creating faster and more efficient robots.
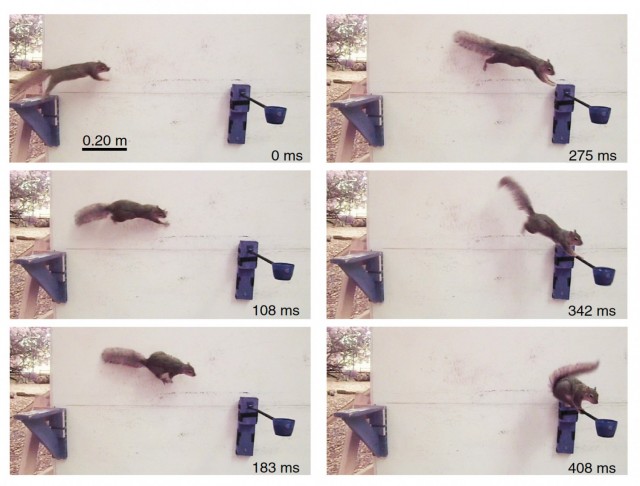
Over the years, researchers at Jacobs Laboratory in UC Berkeley have been studying squirrels’ locomotion techniques to analyze the decision-making processes they go through when leaping between branches. Ph.D students Nathanial Hunt and Judy Jinn developed methods to study free-ranging fox squirrels in the eucalyptus groves of Berkeley. They designed a magnetic climbing wall with an attached springboard to replicate an ordinary tree branch. The researchers then placed the squirrels on the springboard and used peanuts to persuade them to take a leap. The springboards varied in length and flexibility to compare the different responses squirrels had. Using high-speed cameras, Hunt and Jinn recorded the advanced acrobatics the squirrels brought into action.
The videos revealed that in just a few attempts, the squirrels were able to change their body orientations mid-jump based on how efficiently they were able to launch off the board. The varying decision is where exactly they decided to leap, which was based on the trade-off between branch flexibility and the launch-to-landing distance. Hunt and Jinn discovered that squirrels were able to adapt to these various “branches” and make split-second decisions to land without falling off the landing platform. To Hunt and Jinn’s surprise, the squirrels never fell because of their incredible adaptation skills. If they missed the center of the landing perch, they used their claws to swing above or below the branch. The trials further showed that squirrels treat branch flexibility as a more critical variable than the length of the gap. In fact, the strength of the branch was actually six times more crucial than the distance for the squirrel to decide whether or not to jump. Ultimately, the squirrels were able to adopt novel solutions to modify their momentum and speed post-leap — a new insight on how these agile animals navigate through the most challenging real-world environments.
After the experiment, Hunt noted that the ability for robots to replicate the agility and flexibility of squirrels may have a long way to go because of mechanical and cognitive limitations. However, this locomotion research paired with advancements in technology have allowed scientists to improve their work. At the Berkeley Artificial Intelligence Research (BAIR) Laboratory, Ph.D student Xue Bin Peng followed a three-pronged approach of motion retargeting, motion imitation, and domain adaptation to bring these ideas to life. The framework receives input motion data recorded from an animal, and outputs a control policy that enables a robot to reproduce the motion in the real world.
First, given a reference clip recorded from an animal, Peng implemented reinforcement learning which is essentially the ability to learn the most ideal behavior for the maximum reward. This form of learning was used to train a control policy that allows a robot to imitate the motions in real life. Then, the robot was trained to perform the agile behaviors by providing the system with a diverse range of reference motions. The last stage in his process was using domain adaptation to transition from simulation to the real robot. Domain adaptation is a machine learning technique that can apply an algorithm from a source domain to the target domain. In this case, the source domain is the motion recordings of the animals, while the target domain is the real-life robot.
Through these experimentations, Peng has now been able to develop robots that are able to perform simple walking movements based on the video recordings that are fed into the framework. Although it may still take time for the robots to be as quick as a squirrel, there are endless possibilities to create the most intelligent and agile robots because of the extensive research both Jacobs Lab and BAIR Lab were able to bring about. These animal-inspired robots would be able to act as search-and-rescue teams to traverse unknown landscapes and help save people during catastrophic events. In fact the Army Research Office is funding further research to efficiently model the cognition and decision-making processes in squirrels. By studying the fundamental principles of animal morphology, scientists and engineers can work together to spearhead a new era of robots that have the potential to positively influence our world by leaps and bounds.